本帖最后由 mlink_fae 于 2019-8-8 15:01 编辑
在实际开发中,我们会经常使用到LCD屏,LCD屏的种类有很多种,对应的使用方法也有所不同,但是,在ZYNQ 图像传输开发中,思路大体类似,下面介绍在ZYNQ中,使用LCD显示OV5640图像方法。
1.1 概述 下面向大家介绍了在ZYNQ开发板上实现OV5640数据采集在LCD屏显示功能。 测试使用模块:OV5640摄像头,LCD (RGB或HDMI接口) 屏,米联客ZYNQ开发板。 这里需要说明LCD屏的分辨率是1024x600,OV5640使用的分辨率是640X480。 测试工程是在摄像头采集的测试工程的基础上进行修改,下面仅说明区别,其他相同的部分,这里不在赘述。
1.2 硬件工程
总体来说,搭建LCD显示的工程架构同之前搭建OV5640 HDMI显示的工程类似,采集输入端、VDMA处理、显示输出端,这里变化的是显示输出端。 为了做对比,我分别做了RGB /HDMI 接口LCD屏的640x480、640x480_1024x600测试历程。这里使用缩放IP,将640x480分辨率图像放大到1024x600。
LCD屏 | 测试工程 | LCD(RGB接口) | 640x480 |
| 640x480_1024x600 (使用缩放ip) | LCD(HDMI接口) | 640x480 |
| 640x480_1024x600 (使用缩放ip) |
1.2.1 硬件平台搭建
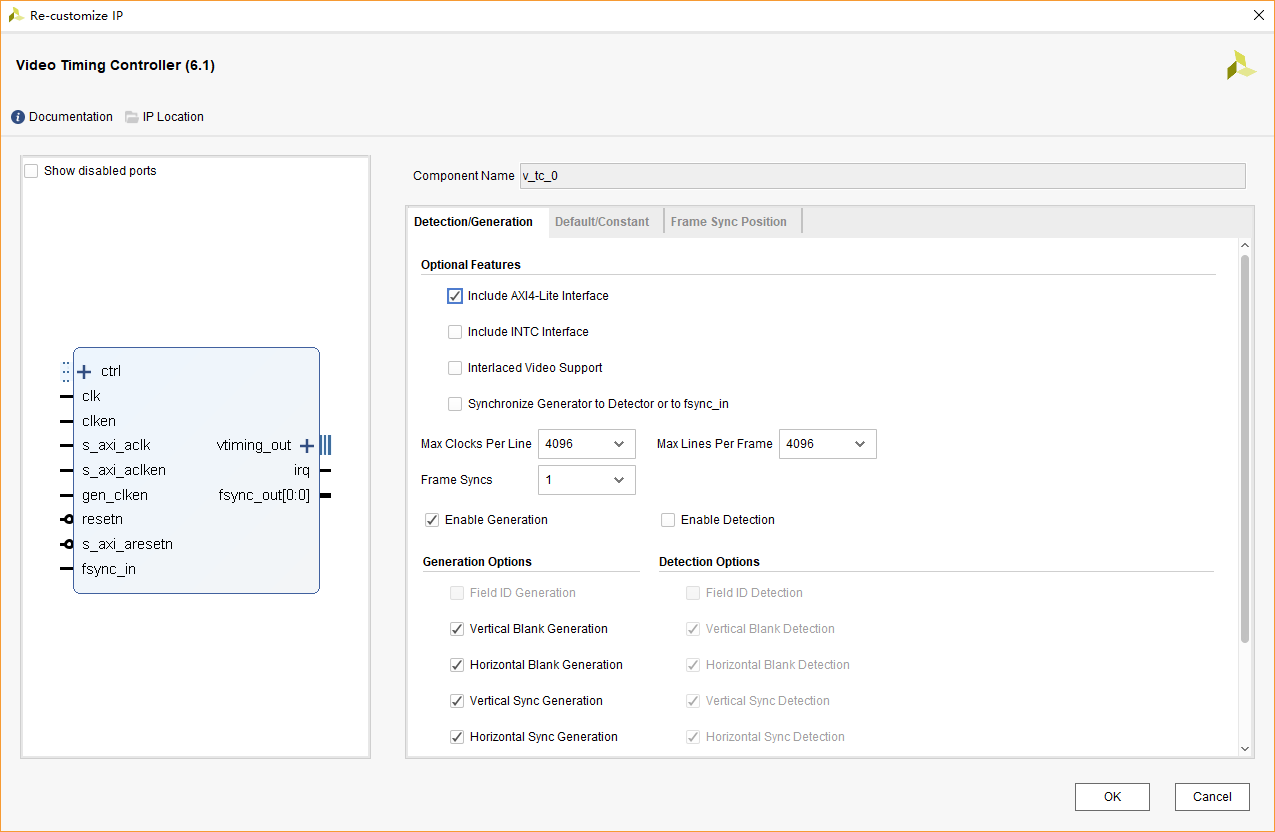
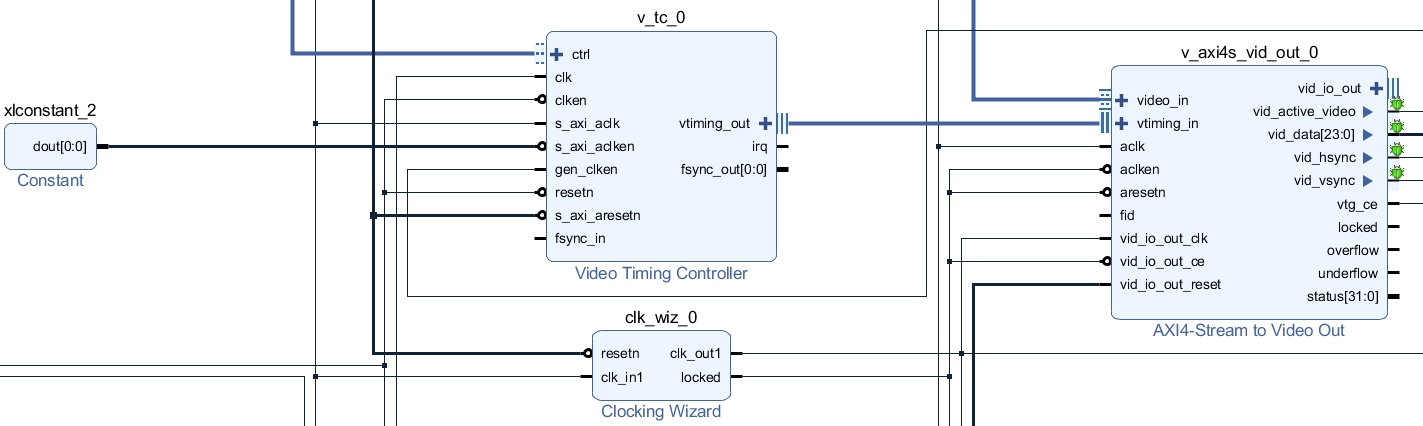
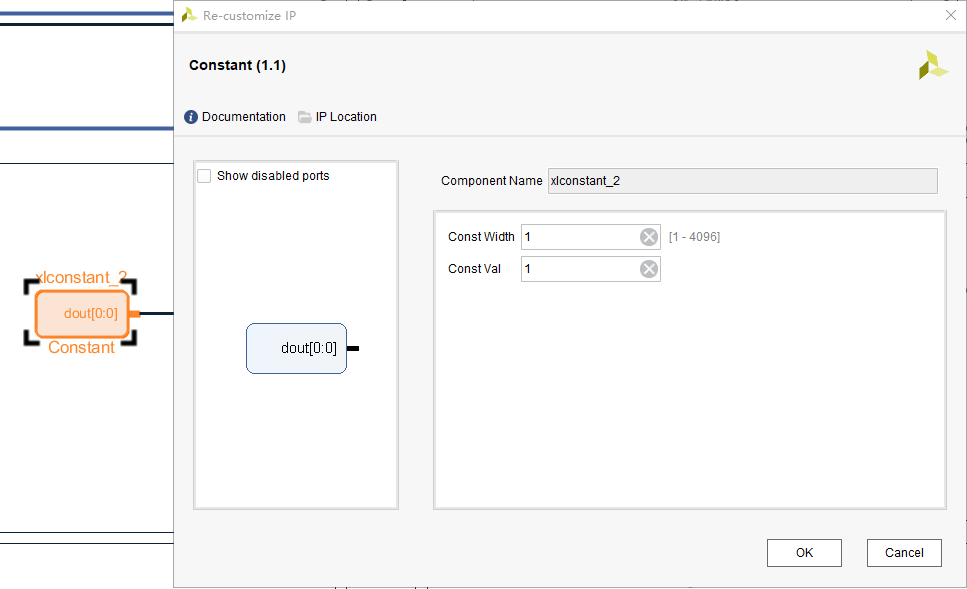
1、VTC设置
由于LCD屏是1024x600,对于VTC中没有现成的参数配置,因此,这里我们使用AXI4总线对VTC分辨率进行配置。 生成后的IP 选择自动连线,将VTC连接到总线上。然后,如图所示连接,并将s_axi_aclken给定值1。
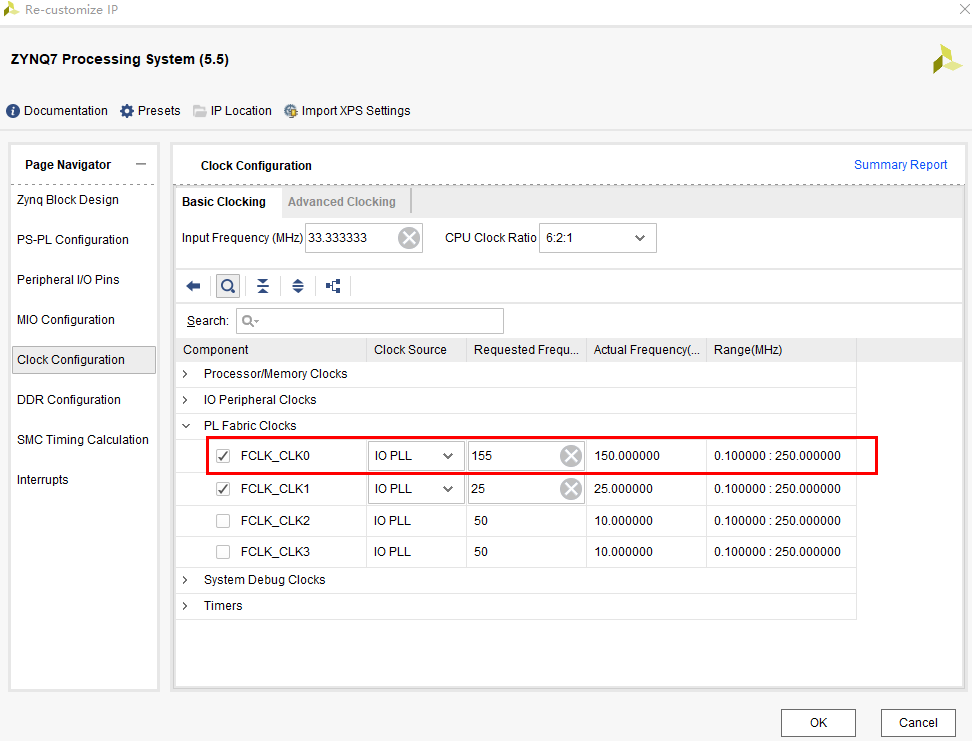
2、ZYNQ 时钟设置
ZYNQ IP 提供的FCLK_CLK0用于AXI 数据传输的时钟,这个时钟给定值要根据数据传输情况给定,不能设置太高也不能设置太低,否则会造成数据的堵塞,不会输出。通常我这里调试,640X480输出会给100M,1080P输出会给155M(实际输出是150M)。具体参考程序。
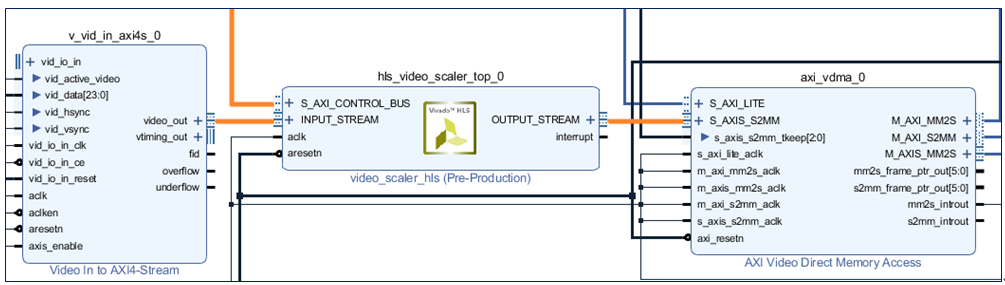
3、缩放IP设置
OV5640的有几种分辨率(640x480、720P),而LCD屏的分辨率是1024x600;如果直接使用5640的分辨率显示,使用640X480输出,则不会铺满整个LCD屏;或者使用720P输出,则720P分辨率大于1024x600,则LCD不能显示5640采集的全部图像;因此,使用了hls封装的缩放IP,可以将输出的分辨率调整为LCD屏分辨率1024x600。 使用的硬件工程,在OV5640 VDMA图像传输的基础上进行修改。将HLS生成的IP添加工程中,将Video In to AXI4-Stream的输出接口与HLS IP的输入接口连接,HLS IP的输出接口与VDMA的AXIS接口连接。
4、LCD接口设置
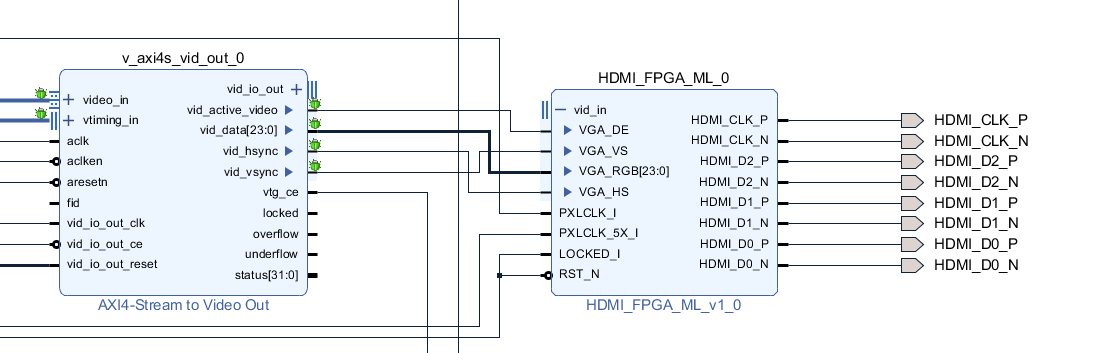
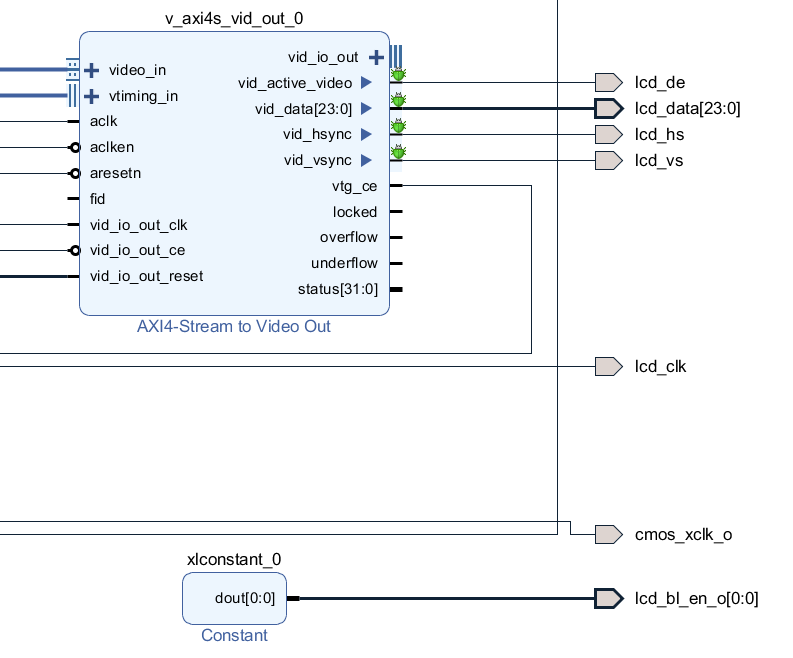
HDMI接口:对于HDMI接口的LCD屏,Video Out IP后面接HDMI_FPGA_ML IP,将RGB信号转换为HDMI信号输出。 RGB接口:对于RGB接口的LCD屏,Video Out IP信号直接输出,这个IP输出的是RGB信号,同事需要注意,对驱动LCD屏的其他信号,如时钟、使能信号进行配置。 1.2.2 SDK工程
640x480显示工程对应的main.c主函数
#include "I2C_16bit.h"
#include "xiicps.h"
#include "xil_io.h"
#include "xparameters.h"
#include "vtc_config.h"
#define VDMA_BASEADDR XPAR_AXI_VDMA_0_BASEADDR
#define VIDEO_BASEADDR0 0x01000000
#define VIDEO_BASEADDR1 0x02000000
#define VIDEO_BASEADDR2 0x03000000
#define H_ACTIVE 1024
#define V_ACTIVE 600
#define H_STRIDE 1024
XIicPs Iic;
u32 i=0;
#define SUM 2457600 //背景写黑 1280*720*4
void main()
{
//设置内存中的背景
for(i=0;i<SUM;i++){
Xil_Out16((VIDEO_BASEADDR0 + i), 0x00);
Xil_Out16((VIDEO_BASEADDR1 + i), 0x00);
Xil_Out16((VIDEO_BASEADDR2 + i), 0x00);
}
// Initialize OV5640 regesiter
I2C_config_init();
// Config VTC
Vtc_init(&Vtc, VTC_DEV_ID, &Vtc_timing, VIDEO_RESOLUTION_WSVGA);
//Xil_Out32((VDMA_BASEADDR + 0x030), 0x108B);// enable circular mode
Xil_Out32((VDMA_BASEADDR + 0x030), 0x108B);// enable circular mode
Xil_Out32((VDMA_BASEADDR + 0x0AC), VIDEO_BASEADDR0); // start address
Xil_Out32((VDMA_BASEADDR + 0x0B0), VIDEO_BASEADDR1); // start address
Xil_Out32((VDMA_BASEADDR + 0x0B4), VIDEO_BASEADDR2); // start address
Xil_Out32((VDMA_BASEADDR + 0x0A8), (H_STRIDE*3)); // h offset (H_STRIDE* 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x0A4), (H_ACTIVE*3)); // h size (H_ACTIVE * 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x0A0), V_ACTIVE); // v size (V_ACTIVE)
/*****************从DDR读数据设置**********************/
Xil_Out32((VDMA_BASEADDR + 0x000), 0x8B); // enable circular mode
Xil_Out32((VDMA_BASEADDR + 0x05c), VIDEO_BASEADDR0); // start address
Xil_Out32((VDMA_BASEADDR + 0x060), VIDEO_BASEADDR1); // start address
Xil_Out32((VDMA_BASEADDR + 0x064), VIDEO_BASEADDR2); // start address
Xil_Out32((VDMA_BASEADDR + 0x058), (H_STRIDE*3)); // h offset (H_STRIDE * 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x054), (H_ACTIVE*3)); // h size (H_ACTIVE * 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x050), V_ACTIVE); // v size (V_ACTIVE)
while (1) ;
}
|
640x480_1024x600 (使用缩放ip) 显示工程对应的main.c主函数
#include "I2C_16bit.h"
#include "xiicps.h"
#include "xil_io.h"
#include "xparameters.h"
#include "vtc_config.h"
#include "xhls_video_scaler_top.h"
#define XPAR_HLS_VIDEO_SCALER_TOP_DEVICE_ID XPAR_HLS_VIDEO_SCALER_TOP_0_DEVICE_ID
#define VDMA_BASEADDR XPAR_AXI_VDMA_0_BASEADDR
#define VIDEO_BASEADDR0 0x01000000
#define VIDEO_BASEADDR1 0x02000000
#define VIDEO_BASEADDR2 0x03000000
#define H_ACTIVE 1024
#define V_ACTIVE 600
#define H_STRIDE 1024
XHls_video_scaler_top XHls_video_scaler;
XIicPs Iic;
void XHls_video_scaler_initialize(void)
{
int status;
status=XHls_video_scaler_top_Initialize(&XHls_video_scaler, XPAR_HLS_VIDEO_SCALER_TOP_DEVICE_ID);
if(0!=status)
{
xil_printf("XPAR_HLS_VIDEO_SCALER FAILED\n");
}
}
void XHls_video_scaler_setup(u16 row,u16 col,u16 drow,u16 dcol)
{
XHls_video_scaler_top_SetRows(&XHls_video_scaler,row);
XHls_video_scaler_top_SetCols(&XHls_video_scaler, col);
XHls_video_scaler_top_SetDrows(&XHls_video_scaler, drow);
XHls_video_scaler_top_SetDcols(&XHls_video_scaler, dcol);
XHls_video_scaler_top_InterruptGlobalDisable(&XHls_video_scaler);
XHls_video_scaler_top_EnableAutoRestart(&XHls_video_scaler);
XHls_video_scaler_top_Start(&XHls_video_scaler);
}
void main()
{
// Initialize OV5640 regesiter
I2C_config_init();
// Config VTC
Vtc_init(&Vtc, VTC_DEV_ID, &Vtc_timing, VIDEO_RESOLUTION_WSVGA);
//Initialize XHls_video_scaler Ip
XHls_video_scaler_initialize();
//set input and output resolution ratio
XHls_video_scaler_setup(480,640,600,1024);
//Xil_Out32((VDMA_BASEADDR + 0x030), 0x108B);// enable circular mode
Xil_Out32((VDMA_BASEADDR + 0x030), 0x108B);// enable circular mode
Xil_Out32((VDMA_BASEADDR + 0x0AC), VIDEO_BASEADDR0); // start address
Xil_Out32((VDMA_BASEADDR + 0x0B0), VIDEO_BASEADDR1); // start address
Xil_Out32((VDMA_BASEADDR + 0x0B4), VIDEO_BASEADDR2); // start address
Xil_Out32((VDMA_BASEADDR + 0x0A8), (H_STRIDE*3)); // h offset (H_STRIDE* 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x0A4), (H_ACTIVE*3)); // h size (H_ACTIVE * 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x0A0), V_ACTIVE); // v size (V_ACTIVE)
/*****************从DDR读数据设置**********************/
Xil_Out32((VDMA_BASEADDR + 0x000), 0x8B); // enable circular mode
Xil_Out32((VDMA_BASEADDR + 0x05c), VIDEO_BASEADDR0); // start address
Xil_Out32((VDMA_BASEADDR + 0x060), VIDEO_BASEADDR1); // start address
Xil_Out32((VDMA_BASEADDR + 0x064), VIDEO_BASEADDR2); // start address
Xil_Out32((VDMA_BASEADDR + 0x058), (H_STRIDE*3)); // h offset (H_STRIDE * 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x054), (H_ACTIVE*3)); // h size (H_ACTIVE * 3) bytes
Xil_Out32((VDMA_BASEADDR + 0x050), V_ACTIVE); // v size (V_ACTIVE)
while (1) ;
}
|
1.3 测试验证
1.3.1 RGB接口LCD屏测试
(1)640X480分辨率输入,直接输出测试 可以看到图像显示仅占据一部分界面,这是因为输出分辨率大于输入分辨率。输入图像仅占据输出图像的一部分。 1)640x480分辨率输出 (2)640x480分辨率图像输入,采集图像经过HLS IP处理放大到1024x600输出。 2)1024x600分辨率输出
1.3.2 HDMI接口的LCD屏测试
(1)640X480分辨率输入,直接输出测试 可以看到图像显示仅占据一部分界面,这是因为输出分辨率大于输入分辨率。输入图像仅占据输出图像的一部分。 (2)640x480分辨率图像输入,采集图像经过HLS IP处理放大到1024x600输出。

2)1024x600分辨率输出 1.4 小结
实际使用中,屏的分辨率和使用方法各有差异,但是使用的思路是类似的,这里给出的是RGB、HDMI接口屏的OV5640传输显示,大家可以根据自己实际使用情况进行调整。
需要代码的朋友,可以给我留言,邮箱发送
|





 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜

 苏公网安备 32040002010688号
苏公网安备 32040002010688号